
Cobots – neue Kollegen in der Digitalen Fabrik der DHBW Mosbach
Mensch-Roboter-Kollaboration praxisnah erleben
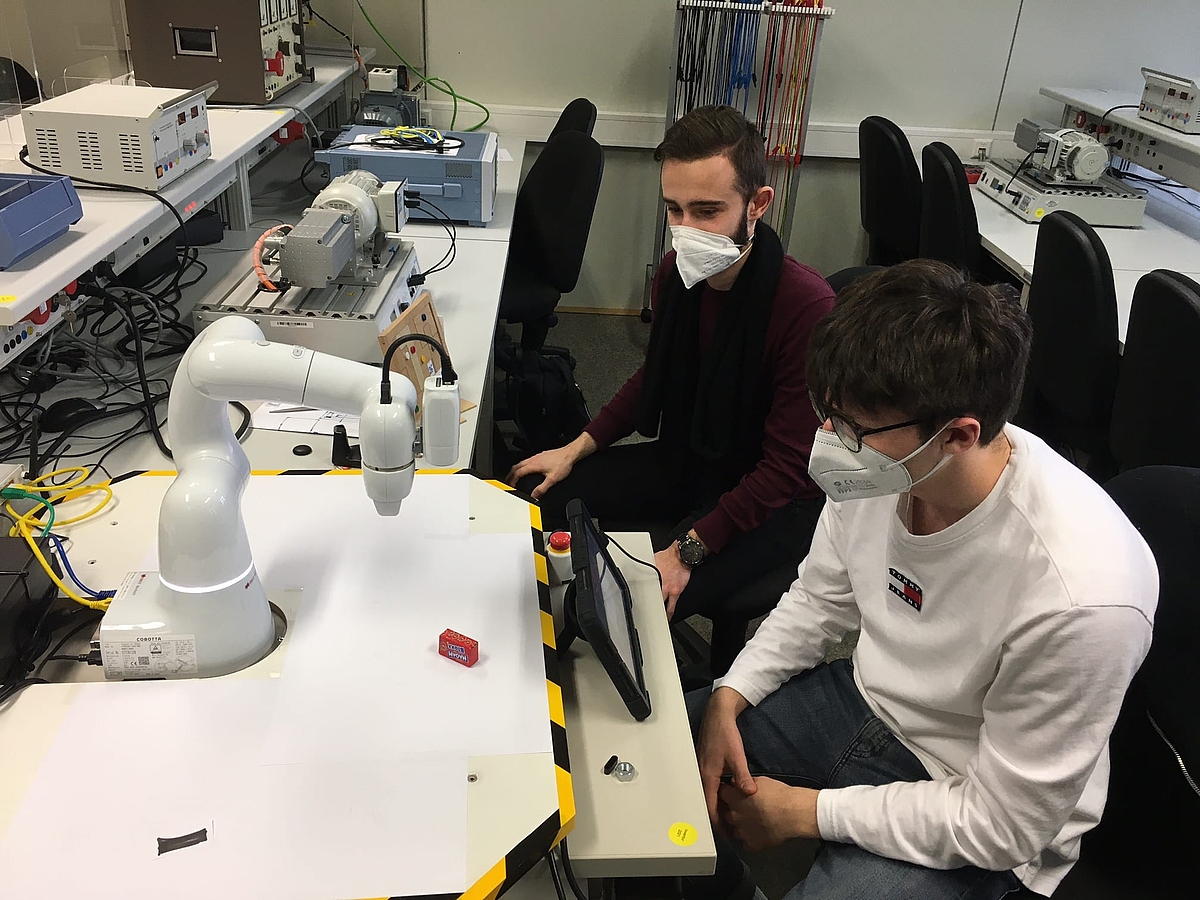
In Digitalen Fabrik des Kompetenzzentrums Fertigungs- und Informationsmanagement an der DHBW Mosbach kommen Cobots[1] vom Typ Cobotta des Herstellers Denso zum Einsatz. Mit einem Eigengewicht von ca. 4 Kilo, einer Traglast von 0,5 Kilo und einer eingebauten Kamera werden sie in der Industrie z.B. für die Automatisierung einer Teilezuführung oder Maschinenbestückung direkt an den Maschinen eingesetzt. In unserer Fertigung steht der Cobot am Ende der Fertigungslinie. Mit Hilfe eines eingebauten 2-Backen-Parallelgreifers ist er darauf trainiert, das Produkt vom Transportwagen zu entnehmen und entweder zu lagern oder direkt dem Kunden zu übergeben.
„Der Roboter dient dem Menschen als Assistent und erleichtert seine Arbeit. Menschliche Fähigkeiten, die der Roboter (noch) nicht erreicht, wie Erfahrung, Lernfähigkeit, Improvisation, Kombination menschlicher Sinne, können zusammenspielen mit Roboterstärken wie Genauigkeit, Stärke, Geschwindigkeit, Wiederholbarkeit. Erweiternd und ergänzend sind in diesem Kontext KI-gestützte Weiterentwicklungen zu erwarten“, so Peter Steinert, Dipl.-Ing. Elektrotechnik und akademischer Mitarbeiter in der Digitalen Fabrik.
In einer praxisnahen Laborübung werden diese Cobots im Zuge einer Laborübung bereits seit geraumer Zeit von den Studierenden des WIW genutzt (https://www.mosbach.dhbw.de/dhbw-mosbach/news-presse/news-im-detail/cobot/).
„Gerade im Hinblick auf die Pick&Place-Szenarien werden von unseren Studierenden hier verschiedene interessante Studienarbeiten sowohl aus technischer Sicht wie auch im Hinblick auf die Wirtschaftlichkeit des Einsatzes durchgeführt“, so Professor Stephan Hähre, Studiengangsleiter Wirtschaftsingenieurwesen.
[1] Als kollaborativer Roboter - oder kurz Cobot (aus dem Englischen: collaborative robot) - wird ein Industrieroboter bezeichnet, der mit Menschen gemeinsam arbeitet und von ihm nicht durch Schutzeinrichtungen wie Zäune, Einhausungen oder Lichtschranken getrennt ist. Bei der Interaktion zwischen Mensch und Roboter sind die Systeme durch Kraft- und Leistungsbegrenzung auf die Einhaltung biomechanischer Grenzwerte eingestellt und überwacht, so dass diese im Kollisionsfall nicht überschritten werden. Mögliche Verletzungen beim menschlichen Kollegen werden so verhindert und ein auch gemeinsames Arbeiten in unmittelbarer Nähe ist möglich. So können Mitarbeiter bei belastenden, monotonen und nicht ergonomischen Aufgaben besser unterstützt werden. Die Automatisierungslücke, die bisher zwischen einer rein manuellen Bearbeitung oder einen vollautomatischen Bearbeitung mit einem Roboter hinter einem Schutzgitter lag, wird geschlossen.
- Studiengangsleitung WIW - Internationale Produktion und Logistik
- Telefon
- 06261 939-292
